


Լիովին ավտոմատացված արևային վահանակ մաքրող ռոբոտ
Արտադրանքի նկարագրություն
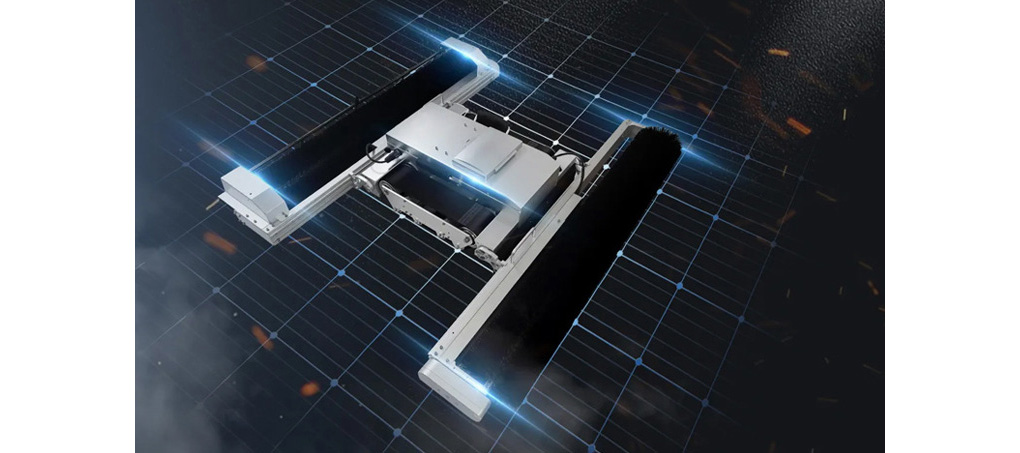
Հակափայլ թաքնված տեսողական սենսորի եզակի դիզայնը ապահովում է, որ ռոբոտը կարող է ճշգրիտ ստանալ դիրքորոշման տեղեկատվություն նույնիսկ ուժեղ աղտոտվածության կամ պայծառ լուսավորության պայմաններում, հնարավորություն տալով ֆոտովոլտային մոդուլների բարձր ճշգրտությամբ դիրքորոշման։
Առանց դաշտային որևէ փոփոխության, ռոբոտի սեփական ալյումինե տեսողության համակարգը կարող է մոդուլի մակերեսին ապահովել միլիմետրային մակարդակի դիրքորոշման նավիգացիա: Առանց մարդկային հսկողության, այն կարող է ինքնուրույն զգալ, պլանավորել և որոշումներ կայացնել՝ կատարյալ մաքրման ավտոմատացման համար:
Դյուրակիր ֆոտովոլտային մաքրող ռոբոտն ունի 6 հիմնական առանձնահատկություն.
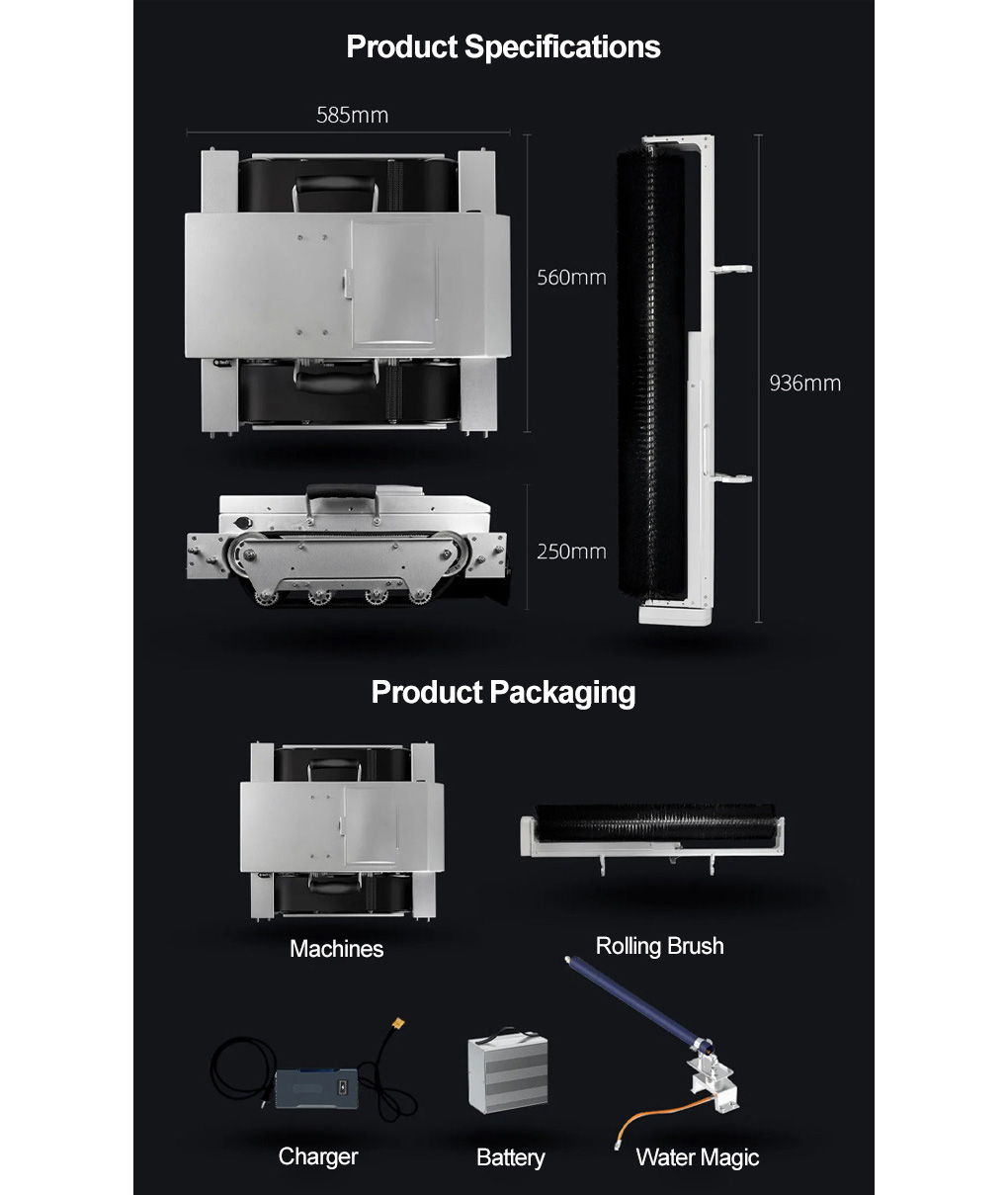
1. Մարտկոցը կարող է փոխարինվել, և մարտկոցի կյանքը անհանգստանալու կարիք չունի
Մեկ ռոբոտը, որը սնուցվում է 2 լիթիումային մարտկոցներով, կարող է ամբողջ մեքենան անխափան աշխատել 2 ժամ: Փամփուշտային սեղմակի տեսակի արագ ապամոնտաժման դիզայնը հեշտությամբ երկարացնում է աշխատանքի տևողությունը:
2. Գիշերային մաքրում, ցածր հզորության ավտոմատ վերադարձ
Մաքրող ռոբոտը կարող է անվտանգ կերպով մաքրման գործողություններ իրականացնել գիշերը և վերադառնալ թռիչքի՝ ցածր էներգիայի հզորությամբ՝ ինքնուրույն դիրքավորվելով։ Օրվա ժամանակը չի ազդում էլեկտրակայանի արտադրության վրա, ինչը զգալիորեն բարելավում է օգտագործողի էներգիայի արտադրության արդյունավետությունը։
3, թեթև և շարժական վահանակ 0 բեռ
Ավիատիեզերական նյութերի նորարարական օգտագործումը, ամբողջ մեքենայի թեթև դիզայնը՝ մաքրման գործընթացի ընթացքում ֆոտովոլտային վահանակի վրա ոտնահարումից խուսափելու համար: Թեթև կառուցվածքի դիզայնը նվազեցնում է օգտագործողների համար բեռնաթափման բեռը, և մեկ անձը կարող է արագորեն տեղակայել և կառավարել տասնյակ մեքենաներ միաժամանակ՝ խնայելով մաքրման ծախսերը և արդյունավետորեն բարձրացնելով աշխատանքի արդյունավետությունը:

4, Մեկ հիմնական մեկնարկային ռոտացիա՝ ինտելեկտուալ պլանավորման ուղի
Խելացի ռոբոտը կարող է գործարկվել մեկ կոճակի սեղմումով: Հատուկ պտտվող մաքրման ռեժիմը, որը հագեցած է ներկառուցված սենսորներով, որպեսզի ռոբոտը կարողանա հայտնաբերել զանգվածի եզրը, ավտոմատ կերպով կարգավորել անկյունը, անկախ հաշվարկել օպտիմալ և արդյունավետ մաքրման ուղին, ապահովել համապարփակ ծածկույթ՝ առանց բացթողումների:
5, ադսորբցիոն աստիճանական քայլք՝ տարբեր թեք մակերեսներին հարմարվելու համար
Ռոբոտը շարժական ներծծող բաժակների միջոցով սերտորեն ներծծվում է ֆոտովոլտային վահանակների մակերեսին, իսկ օժանդակ ներծծող բաժակների աստիճանական բաշխումը թույլ է տալիս նրան ավելի կայուն քայլել 0-45° հարթ լանջերի վրա՝ հարմարվելով տարբեր բարդ աշխատանքային միջավայրերին։
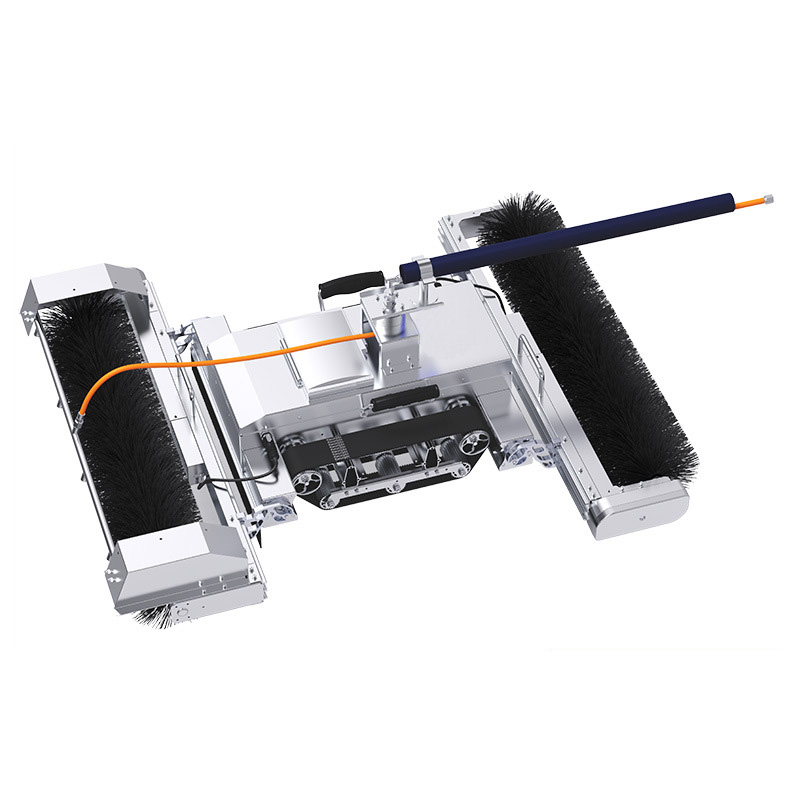
6, տուրբո լիցքավորված նանո ջրազուրկ մաքրում ավելի գերազանց
Մեկ մաքրման սարքը հագեցած է երկու նանոֆիբրային գլանային խոզանակներով, որոնք պտտվում են հակառակ ուղղություններով, որոնք կարող են վերցնել մակերեսին կլանված փոշու մասնիկները և հավաքել դրանք, որպեսզի տուրբո լիցքավորված կենտրոնախույս օդափոխիչի կենտրոնախույս ուժի միջոցով անմիջապես ներծծվեն փոշու հավաքման տուփի մեջ։ Նույն տարածքը կրկնելու կարիք չկա, մաքրում առանց ջրի սպառման, շրջակա միջավայրի պաշտպանության և էներգախնայողության։



-

Հեռախոս
-

Էլ․ փոստ
-

WhatsApp
-

Վերև